
Choosing a versatile and cost-effective AGV that perfectly fits your needs is crucial when starting with automation. There is a wide range of AGVs and AMRs available in the market. Given the variety of features and specifications from different manufacturers, it becomes challenging to identify a perfectly suitable vehicle for your application, especially if you are just starting with automation. We collected the key questions that will help choosing an automated vehicle.
AGV & AMR INTRODUCTION
The terms AGV (Automated Guided Vehicle) and AMR (Autonomous Mobile Robots) can be used interchangeably in many cases, especially if they both use the same navigation type. Please visit this article if you want to learn more about the difference between AGV and AMR.
NAVIGATION TYPES
Magnetic tape navigation

AGV navigation with magnetic tape
With this type of navigation, a magnetic tape defining the AGV path is placed on the floor, and AGVs equipped with magnetic sensors follow this path. The magnetic tape determines the route, and the AGVs simply follow that route. To be able to make a turn at an intersection, RFID tags indicate the location, and the program inside the AGV determines whether to go left or right. This type of navigation is relatively easy to set up. It is a proven and reliable method; however, it has some severe drawbacks – it only works well with simple paths, and you continuously must maintain the magnetic tape as it gets destroyed very easily, especially by forklift trucks. Another limitation of this system is that you can only drive continuously in the forward direction, i.e., driving backward is not possible. The typical speed of the AGV is 0.8 meters per second only. The flexibility of such a system is limited due to the lack of fleet control and the ability to freely choose a path from location A to B. Traffic management is not possible.
Inductive wire navigation

AGV navigation with inductive wire method
With this navigation type, inductive wire is placed inside the floor, and AGVs with a sensor at the bottom follow that route. Installation for this navigation type is quite time-consuming, as the wire should be built into the floor in the facilities. Therefore, changing the routes, in this case, is very challenging, and the overall flexibility of this navigation type is very low. Fleet control typically is not possible with this system.
QR code navigation
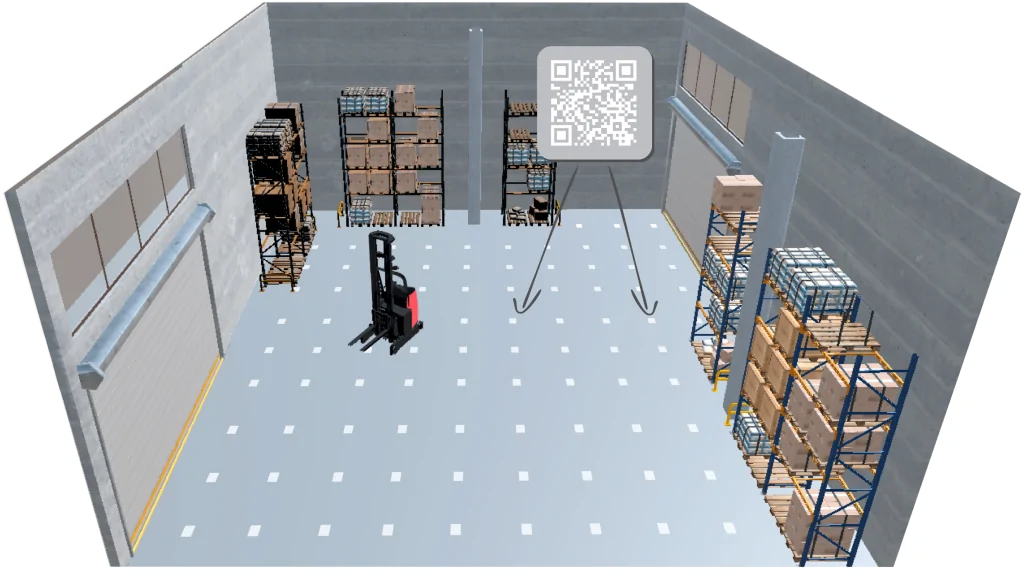
AGV navigation with QR codes
The QR code navigation is mostly used for storage or sortation applications. Driving speed is typically relatively low, and the vehicles drive from one QR code to the other. Most systems can only drive horizontally or vertically, but some of them can drive one segment diagonally. Meaning, it is designed for a very special application, and is limited in its general functionality.
Laser navigation (triangulation)
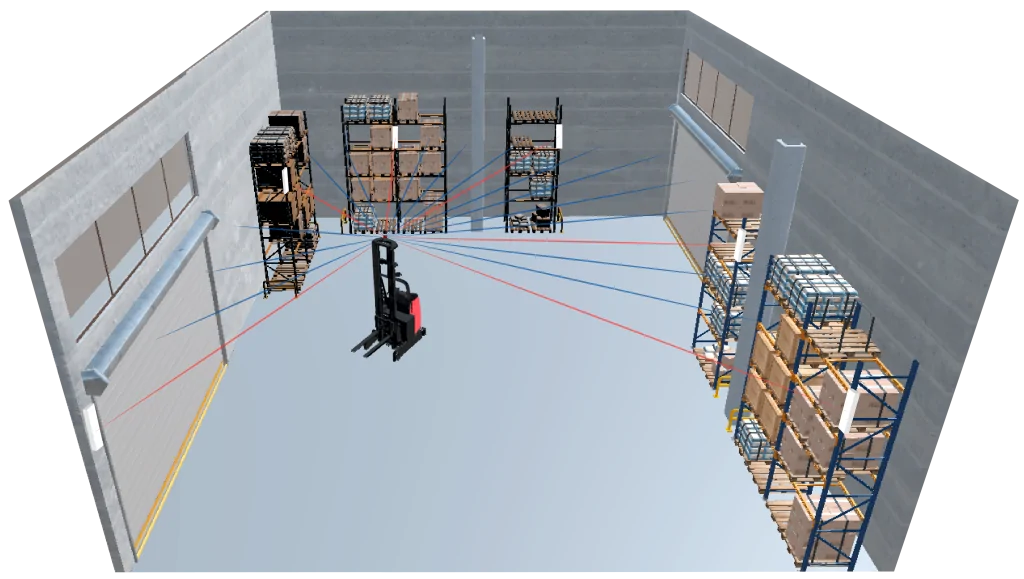
Laser triangulation navigation method
AGVs with laser navigation work via a triangulation algorithm with the help of reflectors that are placed strategically at certain locations. The AGVs are equipped with a laser that is constantly searching for a reflector and determines its position by receiving a reflection back from at least three reflectors at the same time. The installation process is time-consuming, requiring the reflectors to be placed in the environment, performing a survey of the reflectors, and programming the system. This navigation type allows using fleet control to manage multiple vehicles. The disadvantage is a long installation time and the complex process to change AGV paths, resulting in high overall system costs.
Laser navigation (triangulation)
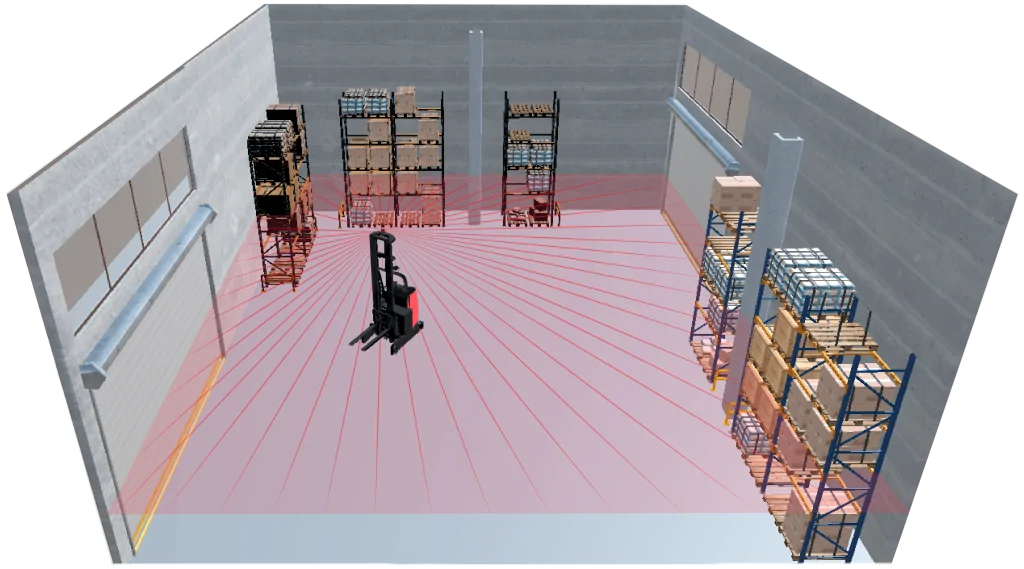
Laser on top of the AGV
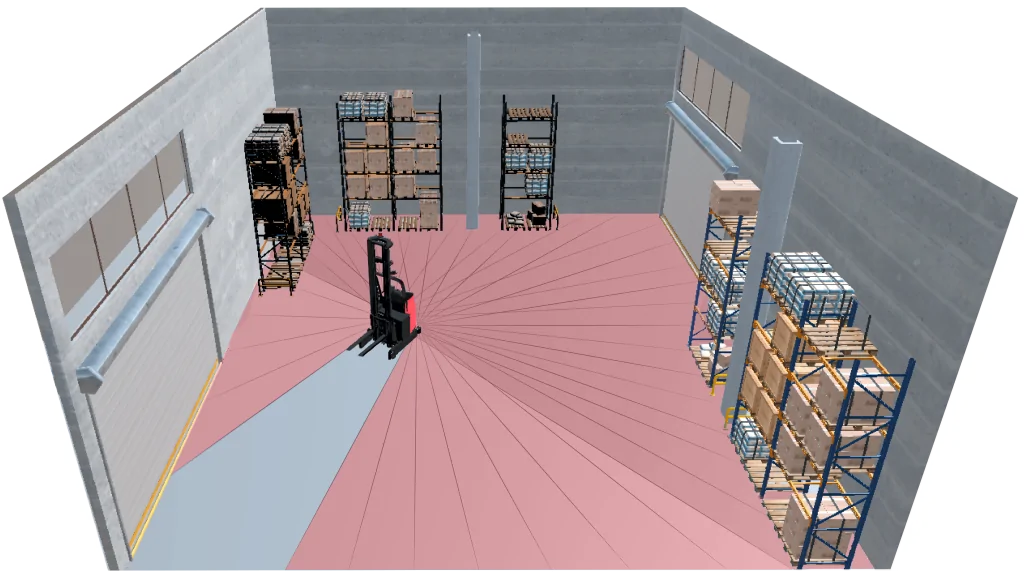
Two safety lasers in the bottom of the AGV
Natural feature navigation works by mapping the environment with sensors and comparing data from the sensors with this map for positioning while the vehicles are driving. AGVs collect data via various methods (sensor fusion), such as Lidar sensors, scanners, odometry, etc. This type of navigation makes AGVs more autonomous in comparison to magnetic tape or inductive wire navigation because all paths are virtual. Although the vehicle routes are still predetermined, it is possible to avoid obstacles and slightly change the route in some cases. Thus, the distinction between AGV and AMR becomes blurred because natural feature navigation provides a degree of autonomy for AGVs as well. It can also be combined with other sensors, typically for precision docking purposes, i.e., a regular camera or 3D camera, or 2D code reader. Moreover, in many cases, safety scanners can be used for both mandatory safety purposes and positioning.
This navigation type provides high accuracy and a short installation time, and good systems won’t need any reflectors either. However, combining natural feature navigation and reflectors is also possible. Speed is only limited by safety requirements; typically, the AGV drives between 1.6 to 2 m/s, but higher speeds of 4 m/s and more are possible.
With fleet control, a highly flexible automation system can be achieved that is fully connected to the factory environment via interfaces to MES, ERP, WMS/WCS, PLCs, and more.
Read more about natural feature navigation in this article.
AGV TYPES
AGVs types differ based on their main function, wheel arrangement, and load/weight capacity. These are the main types of AGVs:
- Forklift AGV. These AGVs are equipped with forks and can carry pallets or other loads. Forklift AGVs are mainly used in warehouses or production sites to move pallets.
- Flatbed AGV – flat AGVs that carry loads on top. These AGVs are often used at manufacturing sites, as they can supply goods to the assembly line or even be arranged as an automated assembly line. Flatbed AGVs can also carry heavy and large loads, they can be used for any type of manufacturing, including automotive.
- Tugger – these AGVs pull carts or a train of carts behind them. Tugger AGVs are commonly used at warehouses to facilitate material handling.
10 QUESTIONS TO START WITH
01
Application area – where are you planing to use the AGVs?
For example,
- Warehouse
- Manufacturing
- Hospital or other
Please, consider the following:
- How much space do you have – what size and type of AGV can actually drive in your facility?
- Loading/unloading – the height of conveyors or racking. Load and unload sequence. This will determine the size, shape, and steering type (single steer drive, differential drive, omni drive) of the vehicle.
- Mixed traffic situations – manually driven vehicles, AGVs, and people in the same area.
- Throughput – how many loads per hour do you need to transport?
- Docking – accumulation of tolerances.
- Need for positioning accuracy, especially during docking processes
02
Functionality – what do you require the AGVs or AMRs to do?
For example, do you need the AGVs to transport materials, load and unload pallets, or carry heavy loads? The answer to this question will determine the basic type of AGV needed. Max speed, max load, special functionality, minimum and maximum lifting table or fork height if applicable.
03
Which navigation type is the best for you?
You must analyze your location and environment to choose the most suitable navigation type. How flexible is the location, is it going to change over time, or is it going to remain stable for years (which is of course highly unlikely). Natural feature navigation will be a better choice especially for changing applications and dynamic environments compared to other navigation types.
04
Do you assume that you’ll need to customize the AGV now or later?
Custom AGV can be adjusted to specific needs, e.g., a specific load, environment change, traffic lines. Flexible AGVs will also provide higher ROI, as they can be tailored to your needs. Navitec’s vehicle control architecture allows for easily changing the onboard AGV functionality like conveyors, lifting tables, integration of additional sensors, and so on.
05
Docking. How critical is the loading and unloading positioning accuracy?
This mainly depends on the application and tasks the AGVs will perform or the task that will be executed in the docking station. Navitec guarantees high accuracy of +- 2 mm absolute with natural feature navigation and sensor fusion.
06
How does the current logistics system and how do current vehicle routes look like?
Analyzing current material flow routes is essential to incorporate AGVs in the most efficient way. Consider how busy the location is, how many vehicles will be driving at the same time, and how many people are walking at the location.
Thinking about who creates the drive orders, how is the connectivity to fleet control, and integration with WMS/WCS is certainly advisable. Also, Navitec offers WMS/WCS software via a partner company, and with such a system in addition to Navitec’s core offering, it is possible to achieve a fully automated factory or warehouse system.
07
How heavy is the load and what are the possible load dimensions?
Wheel geometry according to the size and shape of load, also considering available space for driving and loading height.
08
How many vehicles do you need for your capacity of work? Throughput?
To analyze the number of AGVs needed for your specific application, you need to compare your desired and your current throughputs. Navitec offers a production simulator as a part of our services, to analyze how many AGVs are needed to achieve the desired throughput in your current facilities. Fleet management software can help to manage several AGVs and provide optimal traffic flow. Check this video to see how Navitec fleet-control manages high-density traffic in the warehouse of our customer.
09
What is the desired AGV speed?
The speed of the AGVs depends on the type, size of the location, traffic density, and safety regulations. Usually, the AGVs are driving at 1.6m/s to 2 m/s. In some cases, AGVs can reach the speed of 4 m/s or more, – like in side-loader AGV applications.
10
Safety concept.
While all AGVs are safe and equipped with safety sensors, it’s still important to consider if there are many people walking in the same area, or will it be fully operated by vehicles.
Answering these questions will make the AGV choosing process more comfortable. Try to consider as many factors as possible to ensure the effectiveness of your AGV system. If you are interested in navigation and AGV or AMR fleet management, or if you have any questions, please give us a call or send an email. We’ll be glad to talk!


